RCJ 2026 - Oganesón: Rozdiel medzi revíziami
Zo stránky Galéria Robotov
d |
|||
| (Jedna medziľahlá úprava od jedného ďalšieho používateľa nie je zobrazená) | |||
| Riadok 63: | Riadok 63: | ||
<youtube>uF86j4S_eR4</youtube> | <youtube>uF86j4S_eR4</youtube> | ||
<youtube> | <youtube>nAwwLohU5JA</youtube> | ||
Naše technické video: | |||
<youtube>zCfaycD5PCY</youtube> | <youtube>zCfaycD5PCY</youtube> | ||
Aktuálna revízia z 05:54, 27. apríl 2026
naspäť na zoznam tímov RCJ 2026
Oganesón
Škola/klub: Robotický krúžok pri Spojenej škole sv. Františka, Bratislava
Kontakt: molastudios7@gmail.com
Kategória: tanec/predstavenie
Konštrukcia a hardvér
Zoznam súčiastok
Tri roboty, každý:
- podvozok so 4 mecanum kolieskami, každé poháňané vlastným motorom
- Lidar Coin D6
- 2ks LiIon 3.8V 186500 batérie a plastové držiaky na 18650
- zdroj 5V (8A)
- PICO4DRIVE riadiaca doska so zabudovanými radičmi motorov a ADC prevodníkom
- PICO 2 W jednočopový mikropočítač
- vypínač KCD11
- inteligentná kamera HuskyCam
Dva z nich obsahujú:
- rameno so 6 stupňami voľnosti
- LiPo 11.1V batéria
- Zdroj 5V (8A)
- vypínač KCD11
3D modely, výkresy, náčrty konštrukcie a dielov
- Scéna obsahuje dva veľké biele plastové kvetináče
Schémy, návrhy plošných spojov, elektronika
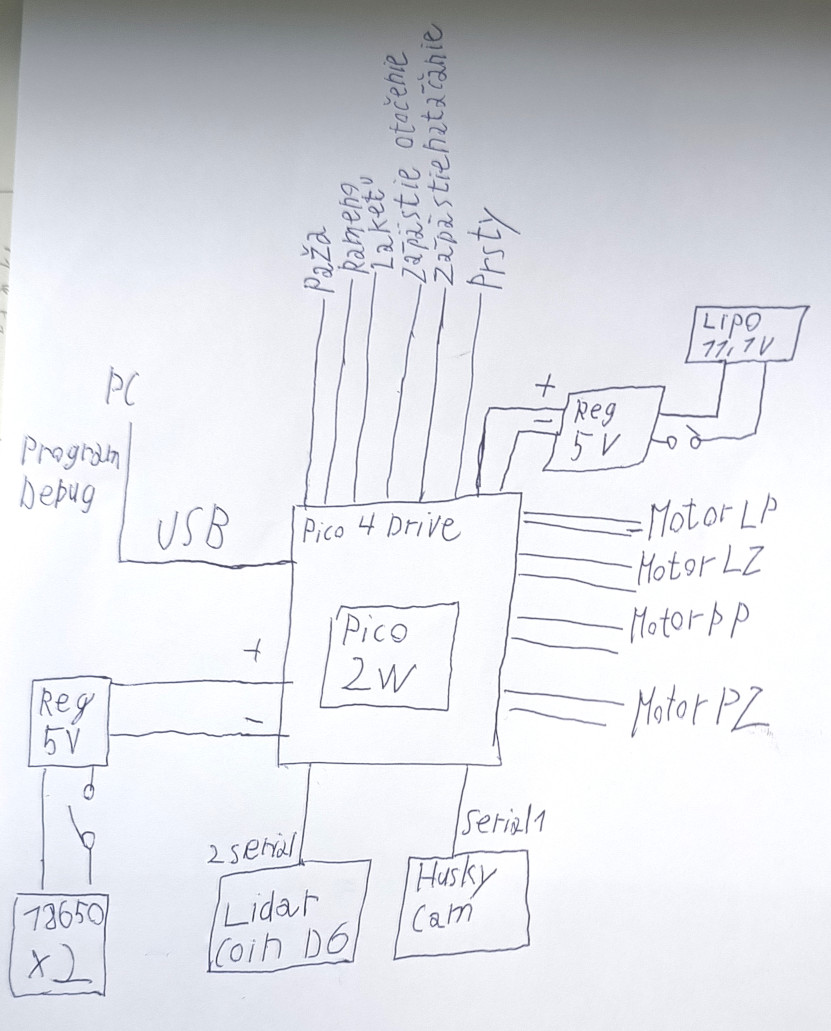
- Riadiaca doska PICO4DRIVE je upravená tak, aby umožnila nezávislé napájanie motorov podvozku a elektroniky z 2x LiIon 186500 batérií a nezávislé napájanie 6 servomotorov ramena

Softvér
- Github repozitár so zdrojovými kódmi
- obsahuje priečinok support, v ktorom sú východzie súbory: zdrojový kód na čítanie z lidaru od výrobcu, ktorý sme prerobili pre RPI PICO, riadenie mecanum podvozku, ktorý sme vyvinuli na krúžku v priebehu minulého roka, jednoduchý program na riadenie 6 servomotorov na otestovanie ramena
Fotodokumentácia



Videodokumentácia
Naše technické video:
Iné
- roboty demonštrujú všesmerové pohyby pomocou mecanum podvozku, pohyb robotického ramena, využitie inteligentnej kamery a využitie lidaru
- náš poster