Moj biped
Robota som vytvoril na krúžku počas viacerých týždňov. Vytvoril som ho podľa pôvodného modelu pre Micro::bit, ktorý som si upravil - aby bol napájaný litium-ion batériami, riadený doskou Arduino Nano, mal ultrazvuk, sirénu v klobúku.
Robota som zostrojil potom, ako som sa asi pol roka učil programovať Arduino riešením jednoduchých úloh, takže som si ho aj sám naprogramoval.
3D Model som upravoval v TinkerCADe:

Takto vyzerá výsledok:

Je to môj prvý vlastný robot, takže ešte sa musím lepšie naučiť upratovať kábliky, ale bol som šťastný, že všetko fungovalo na prvý raz, potom, čo som všetky kábliky popripájal. A nebolo to jednoduché, lebo každé zariadenie potrebuje zem aj napájanie a Arduino Nano má iba jeden vývod 5V a iba dva vývody GND.
- Program: moj_biped.ino
- 3D model na TinkerCADe: Môj Biped - 3D model
- Schéma na TinkerCADe: Môj Biped - schéma
- Plagát A2 na súťaž Istrobot: Media:moj_biped_plagat_istrobot.png
- Diely 3D vo formáte STL: moj_biped_stl.zip
{kind=link}
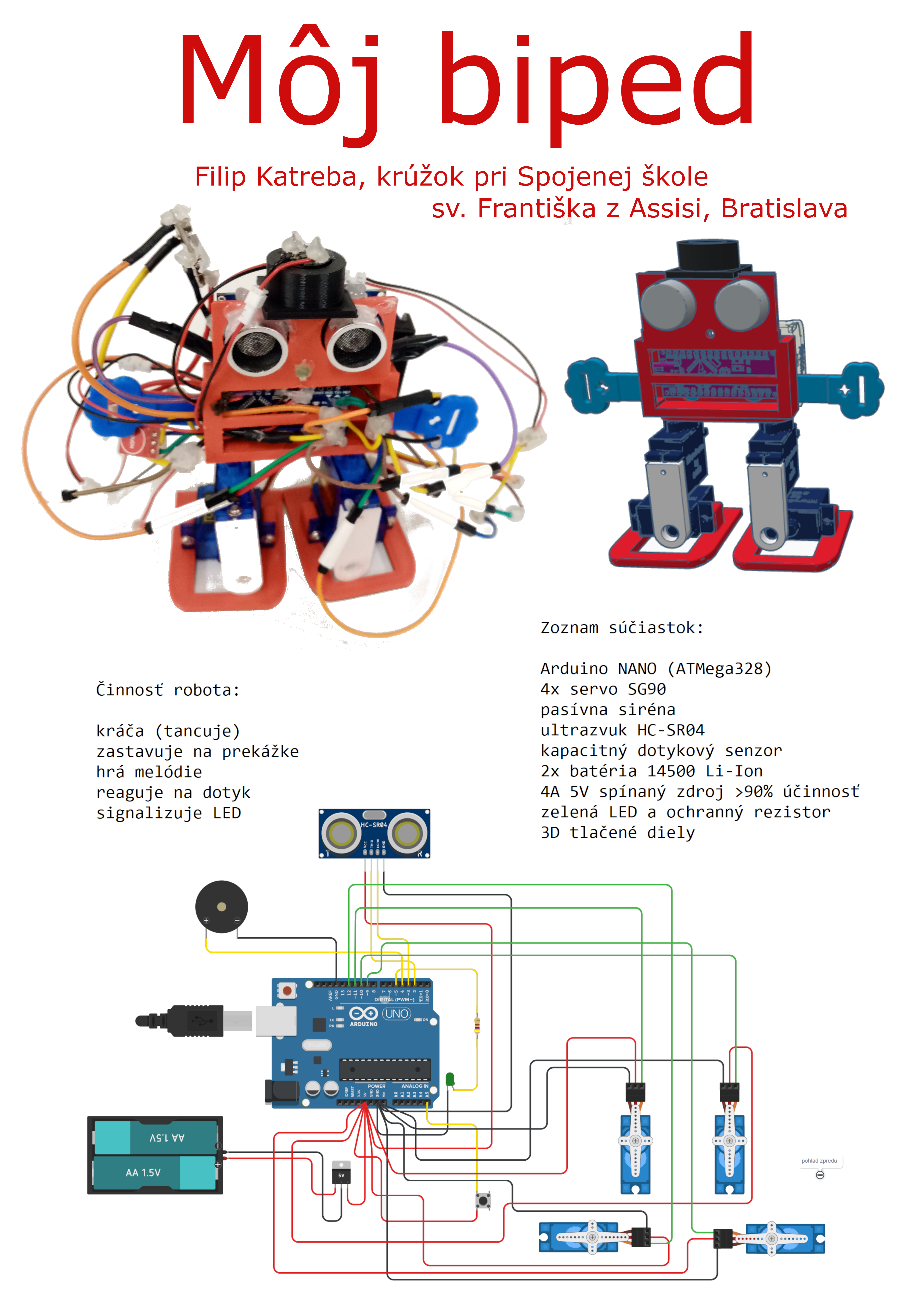
Zoznam súčiastok:
- Arduino NANO (ATMega328)
- 4x servo SG-90
- pasívna siréna
- ultrazvuk HC-SR04
- kapacitný dotykový senzor
- 2x batéria 14500 Li-Ion
- 4A 5V spínaný zdroj >90% účinnosť
- zelená LED a ochranný rezistor
- 3D tlačené diely
Činnosť robota:
- kráča (tancuje)
- zastavuje na prekážke
- hrá melódie
- reaguje na dotyk
- signalizuje LED
Výroba robota:

